Create macro / For poor accuracy
Create macro / For poor accuracy command creates a TerraScan macro automatically. The macro is used to classify points that were collected from locations of bad trajectory accuracy.
Especially in MLS data sets, there might be places of poor trajectory accuracy caused, for example, by the lack of GPS signals. The command can be used to identify such locations based on trajectory position attributes. The process uses accuracy values that are assigned to trajectory positions. See Import accuracy files for more information. If the search finds poor accuracy locations, the resulting macro contains steps that classify points based on time intervals.
To create a macro for poor accuracy:
1. Select Create macro / For poor accuracy command from the Tools pulldown menu.
This opens the Macro for Poor Accuracy dialog:
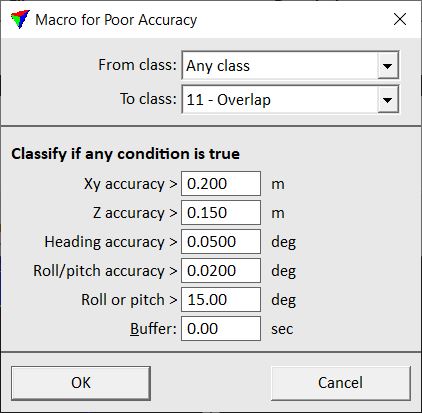
2. Define settings and click OK.
The software computes poor accuracy time ranges from the trajectory positions and creates a TerraScan macro. An information dialog shows the number of added time intervals.
The macro can be saved and applied to the laser points. See Chapter Macros for more information about macros in TerraScan.
SETTING |
EFFECT |
|---|---|
From class |
Point class(es) from which to classify points. The list contains the active point classes in TerraScan. |
To class |
Target class for points collected during poor trajectory accuracy. The list contains the active point classes in TerraScan. |
Xy accuracy |
If the xy accuracy value is bigger than the given value, the trajectory position is added to the macro. |
Z accuracy |
If the z accuracy value is bigger than the given value, the trajectory position is added to the macro. |
Heading accuracy |
If the heading accuracy value is bigger than the given value, the trajectory position is added to the poor accuracy macro. |
Roll/pitch accuracy |
If the roll/pitch accuracy value is bigger than the given value, the trajectory position is added to the macro. |
Roll or pitch |
If the value of roll or pitch angle is bigger than the given value, the trajectory position is added to the macro. |
Buffer |
Number of seconds that is added to each poor accuracy time interval. The seconds are added at the beginning and in the end of a time interval. |