Match Forward and Backward
 Match Forward and Backward tool can be used for matching flightlines from scanner systems which measure the same location twice in a single flight pass, e.g. by elliptical scan pattern.
Match Forward and Backward tool can be used for matching flightlines from scanner systems which measure the same location twice in a single flight pass, e.g. by elliptical scan pattern.
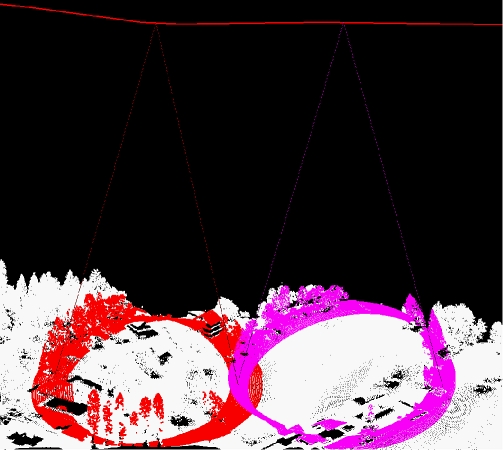
The tool requires that surfaces are classified per flightline with forward and backward measurements in separate classes. It translates the differences between the forward and backward points into corrections of heading, pitch and/or fluctuating elevation corrections using a surface-to-surface matching method.
The Match Forward and Backward tool can use loaded points in TerraScan as well as point files referenced by a TerraScan project. It needs TerraScan trajectories for finding a solution. It can solve for one misalignment angle or the elevation correction at a time.
Find Forward and Backward matching corrections:
1. Select the Match Forward and Backward tool.
This opens the Match Forward and Backward dialog:
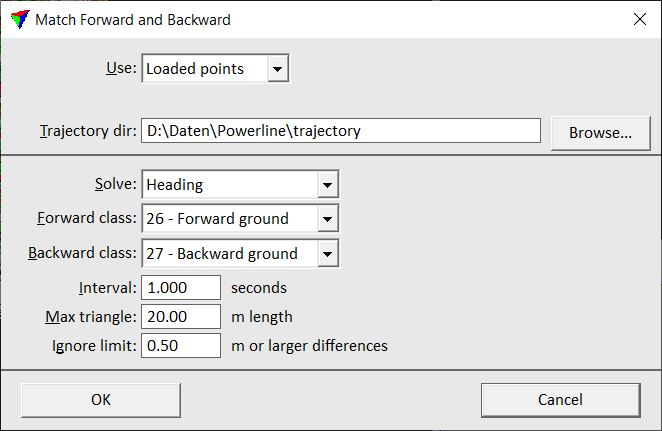
2. Enter settings and click OK.
This opens the Fluctuations dialog. Proceed with applying corrections as described above for Find Fluctuations tool.
Setting |
Effect |
|---|---|
Use |
Data to use for comparison: •Project points - all blocks referenced by a given project file. (not UAV) •Loaded points - points loaded into TerraScan. |
Laser project |
TerraScan project file to apply corrections to. This is only active if Use is set to Project points. |
Trajectory dir |
Directory containing TerraScan trajectory files. |
Solve |
Parameter for which a correction is solved: Elevation, Heading or Pitch. |
Match across flightlines |
If on, an elevation correction is solved in a way the matches individual flightlines to each other as well. This is only active if Solve is set to Elevation. |
Forward class |
Class that contains points on surfaces from forward scans per flightline. |
Backward class |
Class that contains points on surfaces from backward scans per flightline. |
Interval |
Time interval used by the software to calculate a correction value. |
Max triangle |
Maximum length of a triangle created for the surface-to-surface comparison. |
Ignore limit |
Limit value for differences between forward and backward surfaces that the software tries to match. The values should be a bit higher than the largest mismatch between forward and backward points. Larger mismatches are treated as gross errors and therefore not included in the calculation. |